Выбор камеры для распознавания номера - параметр "разрешение камеры"
Больше - не значит лучше. Одно из самых ошибочных мнений, что чем больше разрешение камеры, тем лучше будут распознаваться автомобильные номера. На самом деле, разрешение необходимо такое, которого было бы достаточно для верной идентификации номера автомобиля: маленькое разрешение сделает сильную пикселизацию полученных изображений, что приведет к ошибкам и неточному распознаванию, а большое увеличит нагрузку на вычислительные ресурсы. А мы и так знаем, что процедура идентификации сама по себе достаточно затратная. Зачем еще и на обработку изображения тратить столь дорогие вычислительные ресурсы.
Рекомендуемое разрешение для идентификации автомобильного номера с шириной проезда в 5 метра составляет 1920px на 1080 px.
Какие библиотеки мы используем
TensorFlow — открытая программная библиотека для машинного обучения, разработанная для решения задач построения и тренировки нейронной сети с целью автоматического нахождения и классификации образов, достигая качества человеческого восприятия
OpenCV — библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом.
Dlib — это кроссплатформенная библиотека программного обеспечения общего назначения, написанная на языке программирования C++.
Как работает распознавание лиц
-
Получение изображение с камеры
Это самая простая часть, которая может даже не зависеть от алгоритма распознавания лиц. Задача компьютера — взять видеопоток с камеры, в реальном времени нарезать его на несколько кадров и эти кадры отправить в алгоритм.
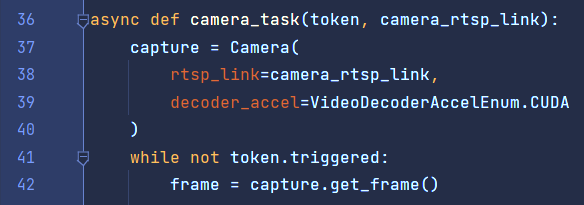
При обработки видеопотока, могут быть использованы аппаратные ускорители декодирования видео
-
Поиск лица в кадре
Перед тем как алгоритм приступит к распознаванию, ему нужно найти лицо на картинке.
Существуют разные методы поиска: методы Виолы-Джонса, нейронные сети, методы сравнения с предыдущими кадрами и т.д.
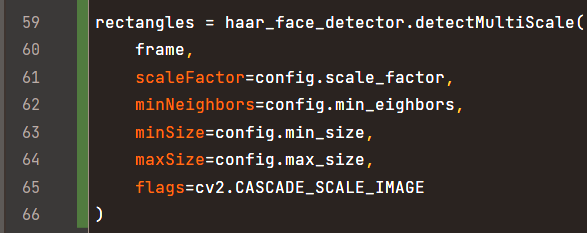
В зависимости от требований заказчика могут использоваться/комбинироваться разные методы поиска лица в кадре. Чаще всего используем нейронную сеть.
-
Построение цифровой модели по ключевым точкам
- Расположение точек в ключевых местах: нос, рот, глаза, брови и так далее;
- Расчет расстояний между точками;
- По расстояниям построение вектора.
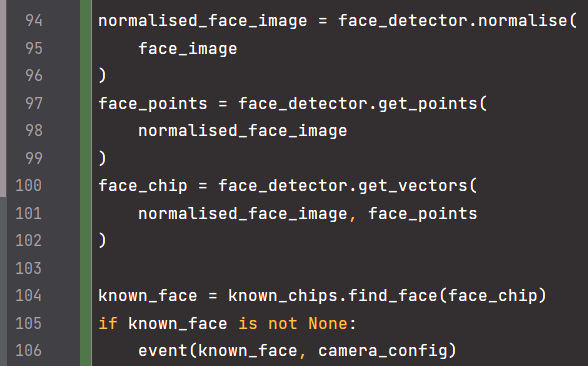
Когда все точки найдены, алгоритм считает вектор — математический результат обработки свойств этих точек. Например, он находит расстояние между глазами, форму носа, толщину губ, форму бровей, расстояния между ними и ещё массу других параметров. В результате получается набор чисел, который называется вектором.
Если алгоритм работает в режиме «обучения», то он записывает полученный вектор в базу данных
Выбор системы управления базами данных (СУБД)
В своих системах мы используем реляционные СУБД. Данные разновидности СУБД обеспечивают высокую нормализацию данных.
В основном заказчикам предлагаем СУБД PostgreSQL.
-
Преимущества:
- Полная SQL-совместимость.
- Открытый исходный код.
- Расширенные настройки с возможностью создания собственных плагинов и персонализацией параметров.
- Расширяемость, позволяющая масштабировать PostgreSQL с помощью хранимых процедур.
- Возможность поддерживать некоторые объектно-ориентированные функции.
- Частые обновления.
При желании заказчика, можно использовать почти все реляционные СУБД.
С нами работают